Data Release 1 is Now Avilable!
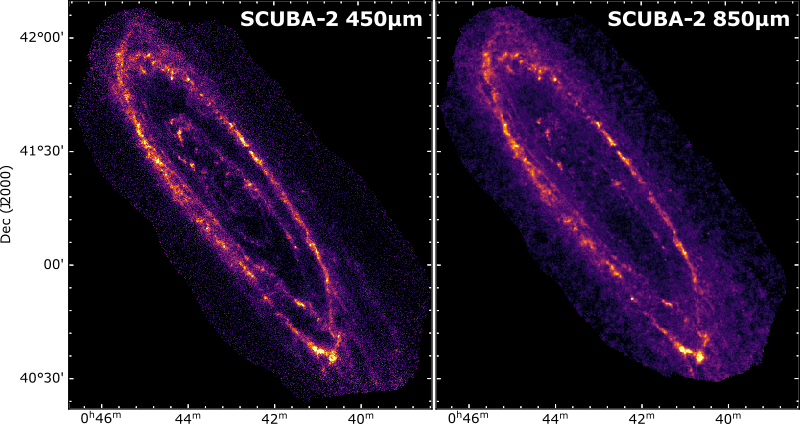
Our SCUBA2 450 and 850 µm images from DR1.
Our first SCUBA-2 Data release in September 2021 provides our SCUBA-2 maps made with ~70% of the final HASHTAG data. The maps are made with our optimised SCUBA-2 pipeline, new adapted skyloop script, and
combined with space-based data to recover all spatial scales. All the software we developed is described and provided on our software page, and the full details of data release are the properties
of the map are in the data release paper.
The typical sensitivity of our maps is ~2.0 and ~3 mJy beam-1 at 850 and 450µm, respectively, with a peak sensitivity in the central regions of 1.5 and 20.6 mJy beam-1 at 850 and 450 µm, respectively. As M31 is (most definetly) an extended source we calibrate our maps in mJy arcsec-2, so if for example if you wish to convert to mJy per pixel multiply the map by the area of the pixel in arcsecond2. As well as our images at native resolution, we also provide images that have been smoothed with Gaussian so users can bace signal-to-noise versus resolution.
The broad-band 850 µm filter includes the wavelengths where the CO(J=3-2) line is present. In our data release paper we use our CO(J=3-2) observations to predict the contamination acorss the whole disk. In general we predict the contamination to be small (mainly as M31 does not emit much CO emission) with our analysis predicting that in 80% of pixels the CO line flux is less than 0.5 K km s-1, which corresponds to ~0.3 mJy beam-1 (much less that our sensitivity), however, our maximum contamination predicted is 28%. Full details of our method are given in the data release paper, and our predicted CO(J=3-2) intensity map is available below.
Our SCUBA-2 maps are all multi-dimensional fits files, containing the following extensions:
| SCUBA-2 450 µm | SCUBA-2 850 µm | |||
|---|---|---|---|---|
| Effective Resolution (FWHM) | File Name | Effective Resolution (FWHM) | No CO(J=3-2) Subtraction | CO(J=3-2) Subtraction Applied |
| 7.9″ | M31-450-DR1-mJyperarcsec2.fits | 13.0″ | M31-850-DR1-mJyperarcsec2.fits | M31-850-DR1-mJyperarcsec2-coSub.fits |
| 8.9″ | M31-450-DR1-mJyperarcsec2-smo4.0.fits | 15.2″ | M31-850-DR1-mJyperarcsec2-smo7.0.fits | M31-850-DR1-mJyperarcsec2-coSub-smo7.0.fits |
| 9.3″ | M31-450-DR1-mJyperarcsec2-smo5.0.fits | 16.8″ | M31-850-DR1-mJyperarcsec2-smo10.0.fits | M31-850-DR1-mJyperarcsec2-coSub-smo10.0.fits |
| 11.2″ | M31-450-DR1-mJyperarcsec2-smo5.0.fits | 19.1″ | M31-850-DR1-mJyperarcsec2-smo13.0.fits | M31-850-DR1-mJyperarcsec2-coSub-smo13.0.fits |
| CO(J=3-2) Predicted Intensity (K km s-1): | M31-predicted_CO3-2.fits | |||
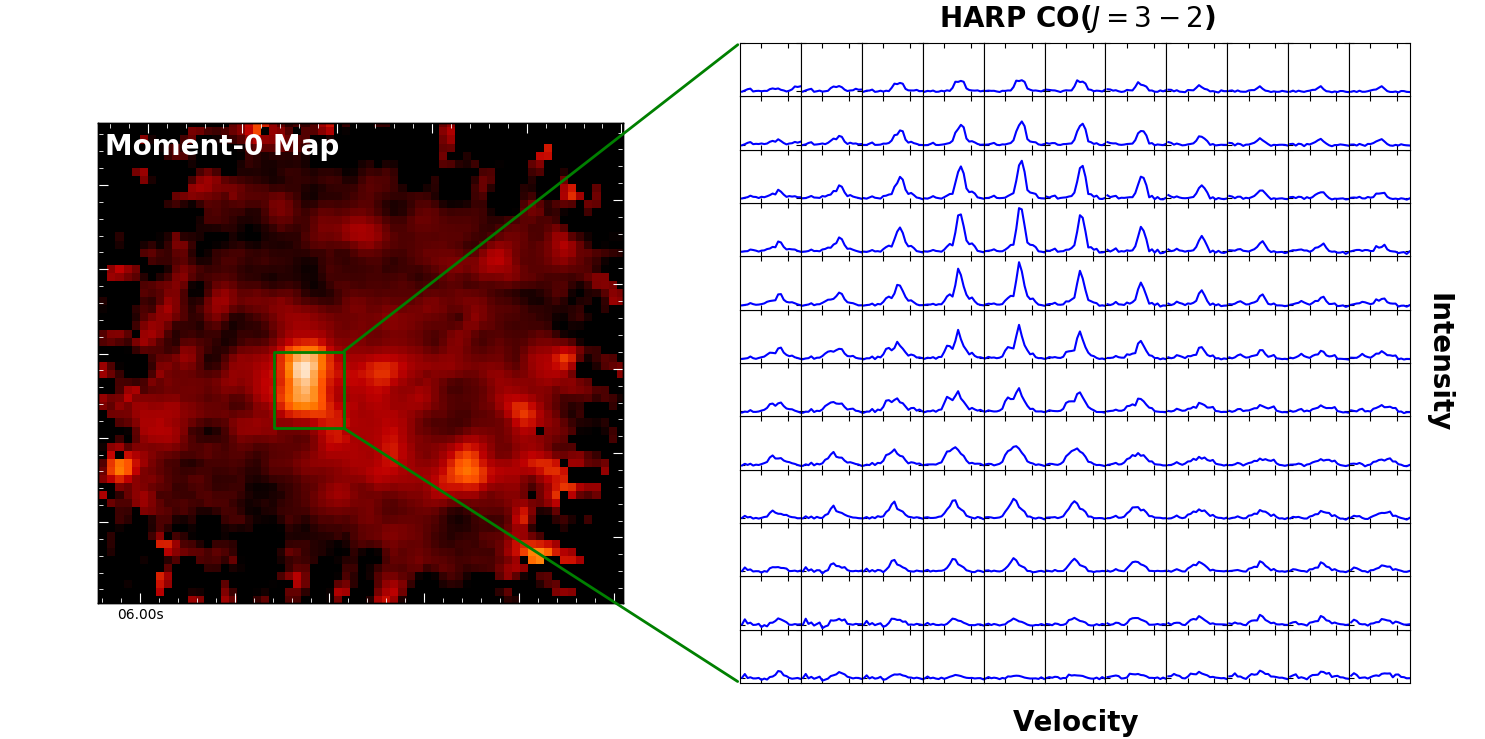
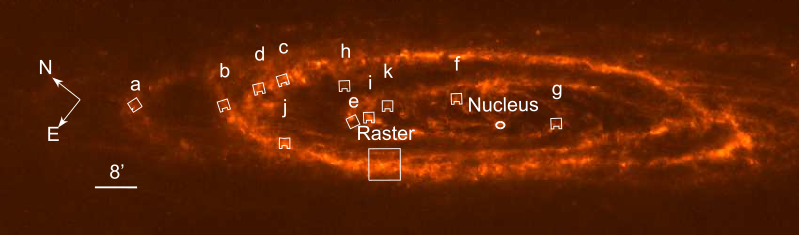
An illustration of an of our raster CO(J=3-2) cube.
For HASHTAG we target 12 regions across Andromeda with HARP on the JCMT. HARP is a 16 pixel (4×4 grid) hetrodyne instrument with an instaneous 2 GHz bandwidth
(in practice for our observations typically 14 pixels were operational). In total we observe 60 square arcminutes, reaching a sensitvity of ~13 mK (Ta*) in 1
2.6 km s-1 channel. All details of our observations and reduction are given in
Li et al. (2019)
We provide two sets of cubes, one at the raw resolution of HARP and one smoothed to the same resolution as the IRAM CO(J=1-0) data. For each sets of cubes, we create a moment-0 map using the Hi VLA data as a prior (see Smith et al. 2021) to extract the CO line. This enables us to detect the faintest lines. Moment-0 maps where channels are identified just from the cube itself are also provided which were presented in Li et al. (2019). We also provide an uncertainy map for the moment maps created with the Hi prior. The image at below the table shows the locations of each of the fields.
| Field | RA (h:m:s) Dec (°:':") |
Raw (13.5") Resolution | 23" Resolution | ||||
|---|---|---|---|---|---|---|---|
| Cube | Moment-0 Maps | Error Mom-0 | Cube | Moment-0 Maps | Error Mom-0 | ||
| JIGGLE-a | 00:46:30.5 +42:11:54.8 |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
| JIGGLE-b | 00:45:34.3 +41:58:29.5 |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
| JIGGLE-c | 00:44:36.7 +41:52:36.5 |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
| JIGGLE-d | 00:44:58.7 +41:55:11.0 |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
| JIGGLE-e | 00:44:26.1 +41:37:14.3 |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
| JIGGLE-f | 00:43:03.3 +41:24:21.5 |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
| JIGGLE-g | 00:42:21.4 +41:06:26.4 |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
| JIGGLE-h | 00:44:03.1 +41:42:44.6 |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
| JIGGLE-i | 00:44:13.2 +41:35:22.3 |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
| JIGGLE-j | 00:45:26.8 +41:45:00.0 |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
| JIGGLE-k | 00:43:52.2 +41:33:54.2 |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
| RASTER | 00:44:40.4 +41:27:25.9 |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
Cube File | Hi Prior: Mom0-map No Prior: Mom0-map |
Noise-map — |
Data Release 1 is Now Avilable!
If you from one of the EAO partners and want to get involved, go to the team page, and find your local contact. If you have any other questions about HASHTAG you can use the contact details below, or if you hvae a specific question about a paper contact the lead author.
The JCMT is operated by the East Asian Observatory association. For more information about the JCMT and EAO click on the icon below.